近年来,随着IoT(物联网)、大数据、传感器、人工智能等技术的不断发展,世界各大航运强国都加速了船舶自动化技术的研发和实船验证。
中国自主研发的世界上最大吨级智能航行集装箱船“智飞”号于2022年4月在山东青岛港首航,挪威Yara公司研发的世界上第一艘纯电动无人驾驶集装箱船“Yara Birkeland”于2021年11月在奥斯陆峡湾开启首航,2022年5月举行了隆重的命名仪式,即将进行商业运营。
日本财团发起的“MEGURI2040”项目分别于2022年1-3月,成功完成了6个船型的自主航行示范试验,向着日本国土交通省提出的在2025年实现海上自主水面船(MASS)实际应用的目标更进了一步。
作为“MEGURI2040”项目参与者之一的日本邮船集团(NYK),一直是船舶自动化技术研发和创新的主力。
2022年3月,NYK提出的“完全自主船行动计划和执行系统APExS-auto”获得船级社的原则性认可(AiP),这是其研发的“载人自主船行动计划和执行系统APExS”的升级版。
APExS系统全称为Action Planning and Execution System,是一个自主船概念设计框架,旨在为自主船设计提供整体思路和指导思想。
● APExS系统的概念提出
由于海上交通事故原因的90%与人为因素有关,先进的计算机技术可以协助船员进行船舶航行操纵,减少人为因素(疏于瞭望、船艺不佳等)导致的碰撞、搁浅等事故,显著提高航行安全,并减轻船员的工作负荷。
在2018年举行的国际海事组织(IMO)海上安全委员会第99届会议上,IMO将MASS的自主程度分为四个等级,分别为:
等级1:船舶配备自动化处理和决策支持功能;
等级2:海员在船,具备远程遥控功能;
等级3:海员不在船,具备远程遥控功能;
等级4:完全自主船。
2016年6月,日本国土交通省发布“海事生产性革命”(i-Shipping和j-Ocean)发展战略,计划在2025年实现MASS的实际应用。
为制定自主船的标准和安全要求,收集评估方法、应急措施等数据,国土交通省于2018年5月开展自主船研发与应用示范工程,包括自动船操纵功能、远程船舶操纵功能、自动靠离泊功能三大板块,面向全社会公开招聘实船验证实施者。
针对IMO自主船的等级划分,日本邮船集团旗下的MTI公司和海洋科学公司(JMS)联合开展了载人自主船研发,其得以实现的核心系统为“行动计划和执行系统”(APExS)。
MTI公司携“载人自主船行动计划和执行系统”与14家合作伙伴一起入选为国土交通省远程船舶操纵功能版块的实施者,APExS的概念就此提出。
● APExS系统的功能
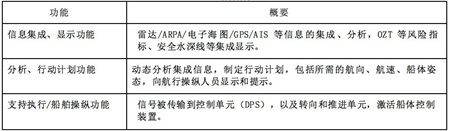
“载人自主船行动计划和执行系统APExS”的功能目标,是为船员的态势感知和决策判断提供必要支持。
它具有信息集成和显示功能、信息分析并制定行动计划功能、支持船舶操纵和执行功能。
通过使用该系统,除了减轻船员的负担外,还具有与包括陆地和其他船只在内的远程对象共享信息,实现“人”“物”互联的作用。
表1 APExS的功能
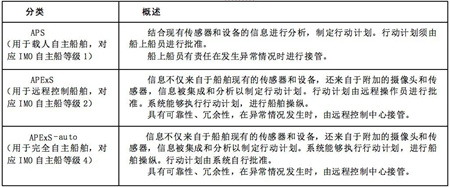
● APExS系统的分类
APExS系统可以分为以下三类(见表2),分别用于假设的载人自主船舶、远程控制船舶和完全自主船舶的操作模式。
表2 APExS的分类
● APExS系统的工作流程
图1显示了APExS系统的工作流程,其中,APExS系统的核心部分是行动计划单元(APU)。
如图所示,计算机系统首先通过多元传感器(电子海图、ARPA等)进行航行数据收集和信息整合,然后通过APU对信息进行分析和集成,以此制定出行动计划方案,显示(紧迫时通过声光音效报警)给船上的航行操纵人员(人机共融)进行核实确认和批准(必要时进行修正),在行动计划经过批准之后,控制单元/执行器(主机、舵机等)予以执行。
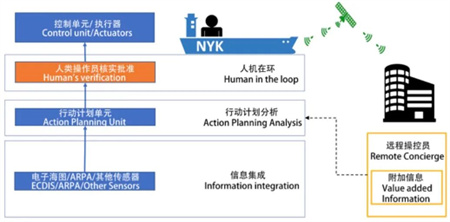
图1 APExS系统的工作流程图
● APExS系统的人机分工
APExS系统的特点是人机共融,船员与计算机系统高度协作。
因此在系统的设计中,明确船员与计算机系统在任务执行中的各自职责分工非常重要。
在航行阶段、启停阶段、靠离泊阶段,大部分工作都由计算机系统来完成,船上船员只在核实和批准行动计划方案时独力担当,其他步骤都主要由计算机系统来承担。
这与传统的由船员负责分析、计划、执行的任务模式大为不同。
APExS系统设有远程操控中心,但远程操作员的职责是向APExS系统输入附加信息(航行通警告、海盗风险、突发状况等),为计算机系统制定行动计划予以辅助。
正常情况下,他们不直接操纵船舶,也不参与行动计划的核实。
他们只提供服务,因此被称为“远程礼宾”(Remote Concierge)。
图2显示了船舶操纵任务中的人机分工。
如图2所示,与船舶操纵相关的任务决策可以分为以下五种:
1.信息收集与集成:基于多元传感器等信息,本船(位置、船头方向、航速)、他船(位置、船头方向、航速)、地理信息、天气/海况(风向、风速、波向、波高、海流等)情况。
2.状况分析:根据获得的信息,掌握当前和未来的情况及相关风险。
3.制定行动计划:根据分析结果,制定适当的行动计划(航行路线、航速、船体姿态)。
4.核实、批准:综合判断行动计划是否合适,必要时进行更正,予以批准。
5.执行、控制:按照批准的行动计划来控制执行器(主机、舵机等)。
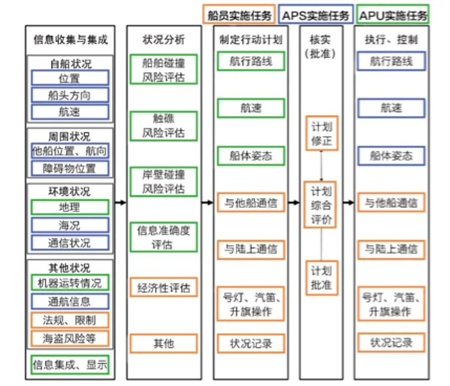
图2 船舶操纵任务中的人机分工
● APExS系统的场景应用
具体来说,APExS系统可在以下场景中发挥作用:
1.防碰撞防搁浅支持:制定并提出行动计划,来支持船舶安全航行,防止航行中的碰撞或搁浅。
根据不同的航行区域而选用不同的数据分析参数,比如在公海、沿海水域、拥挤海域或航道内。
2.启停支持:制定和提出用于停船或开船的行动计划,以应对抛锚、停泊、系泊、紧急制动、重启制动等情况。
3.靠泊、离泊支持:制定和提出行动计划,用于靠泊和离泊支持,通过使用不同的执行装备,如主机、舵机、推进器、拖船等的辅助,来调整船舶的具体位置和姿态。
● APExS-auto系统
APExS-auto系统是APExS系统的升级版,即“完全自主船行动计划和执行系统”(Action Planning and Execution System for Full Autonomous)。
除了具有APExS的全部功能以外,APExS-auto将行动计划方案由船员进行核实批准这一步骤也交由计算机系统来执行,此时船上不再配有船员,整个航行任务将主要由计算机系统来完成,远程操作员的作用是为船载计算机系统提供支持和接管后备,完全自主船的愿景得以实现。
图3显示了APExS-auto系统、APExS系统和目前有人船,在与船舶操纵相关的五种任务决策中的人机分工和工作流程对比。
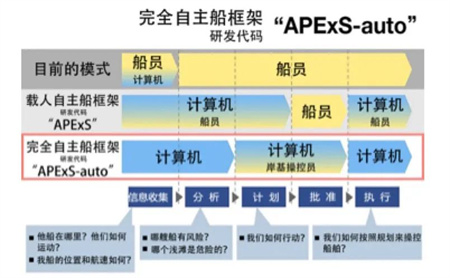
图3 APExS-auto、APExS和目前模式的工作流程对比图
● 设计运行区域ODD、对方接管Fallback机制和最小风险状态MRC
计算机系统不会包罗万象,也不会万无一失,总有失控、失灵、超出设计范围的特殊情况出现。
因此,在研发自主船行动计划和执行系统时,必须将系统之外的设计区域(即ODD之外)和替代措施(Fallback机制)一并考虑到。
1.设计运行区域ODD
根据日本船级社《船舶自动化/自主操作指南—AOS/ROS的设计开发、安装和操作》中的定义,设计运行区域(Operation Design Domain,ODD)是指,自动操作系统(Automated Operation System,AOS)或远程操作系统(Remote Operation System,ROS)能够正常工作时的区域。
ODD的设计参数包括并不限于以下因素:航行区域等地理因素,气象、海况、时区(白天/夜晚)等环境条件,船舶交通拥堵程度,交通系统支持环境(包括港口基础设施在内)等。
当计算机系统或执行器(转向、制动、驱动等)因故障、网络攻击等不可预知的事件而失效,任务信息源的一部分甚至全部缺失,即使通过人工输入附加信息的方式进行修正,依然无法进行正确分析、制定行动计划和控制执行时(即ODD范围之外),对方接管Fallback机制和最小风险状态MRC被启动。
2.对方接管Fallback机制和最小风险状态MRC
Fallback后退运行,又称对方接管机制,是指当出现超出ODD范围之外,计算机系统无法正常工作的情况时,所采取的使风险最小状态(Minimum Risk Condition,MRC)的措施。
最小风险状态(MRC) 是指维持目标任务执行所必需的最低功能的状态,即在超出设计运行区域ODD范围时,进行人工干预以调整回预期状态。
当计算机系统偏离ODD时,必须通过Fallback来保持MRC。
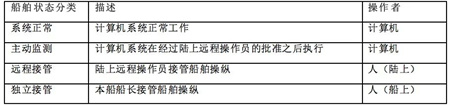
以载人自主船为例,如表3所示,船舶状态随着内外部条件和环境因素的不断变化而改变,分为四类情形:系统正常、主动监测、远程接管、独立接管。
❖ 系统正常:计算机系统运转正常。
❖ 主动监测:计算机系统做出的决策和指令需要经过陆上远程操作人员的核实才能执行。
❖ 远程接管:陆上远程操作人员全面接管船舶,进行船舶操纵。
❖ 独立接管:自主船的船长启动最小风险控制(MRC),实施应急操作。
表3 船舶状态和Fallback机制
● 自主船的设计方法:基于模型的系统工程(MBSE)
在自主船的设计过程中,日本邮船集团提出将自主船作为一个系统体系(System of Systems,SoS)进行设计,采用了基于模型的系统工程的开发方法。
基于模型的系统工程(Model based Systems Engineering,MBSE)开发方法,将自主船视为一个系统体系(SoS),进行系统化的概念设计和程序设计。
日本邮船集团的设计思想是, 基于模型的系统工程(MBSE),通过模型表达复杂的思想,通过确定模型的层次结构来设计模型,可以在模型中的不同层面进行设计,在模型上重复仿真,从而并行推进开发和验证。
与传统方法的先创建技术思想、元素和规范,最后验证成品相比,MBSE方法最大限度地减少了开发过程中的返工,大大提高了研发效率。
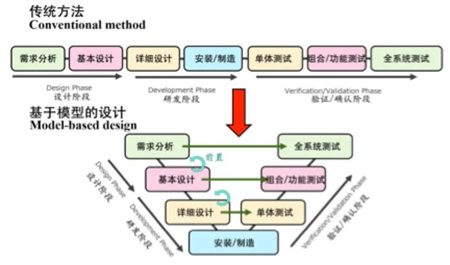
图4 基于模型设计的开发方法与传统开发方法对比
● 实船验证远程船舶操纵功能
作为日本国土交通省远程船舶操纵功能版块的实船验证实施者,日本邮船集团旗下的MTI公司与14家合作伙伴,分别于2020年1月和12月,开展了两次以拖轮“吉野丸”(Yoshina Maru)为对象的远程船舶操纵实船实验,以验证“载人自主船行动计划和执行系统” APExS的实际效果。
“吉野丸”在东京湾内航行,从横滨市本牧港驶往横须贺港,航程约12公里。
岸基远程操控中心位于400公里以外的西宫市(大阪市附近)。
第一次航行实验中,远程操控中心的工作人员使用拖轮上的传感器和摄像机获取环境信息,以制定航线计划和行动计划(避碰路线计划),经由拖轮船长评估、确认和批准执行。
此次实验的目的是,对远程导航拖轮按照制定的航线计划和行动计划来完成任务的条件进行确认和评估。
第二次航行实验中,完成了对以下两个方面的实验:(1)设备故障或船岸通信中断时的船舶响应功能和安全功能测试;(2)船舶远程控制的可用通信宽带对数据通信量的优化测试。
通过实船验证,展示了远程操控中心对船舶的实时态势感知和制定航线计划、行动计划的可行性,证明了自主船概念设计框架APExS系统的实用性,也为技术标准和安全指南的制定积累了数据。
● 对我国智能船发展的启示
日本在当前国际规则背景和技术发展阶段之下,围绕无人船发展做出的技术研发和战略规划对中国具有重要的借鉴意义。
1.依托自主船科研项目和实践经验,同步修订法规、制定标准。
中国要抓住“智飞”号等智能船试航和运营所积累数据经验的机遇期,同步开展法规规范化、技术标准化工作,深度参与IMO法规和ISO国际标准等国际规则的制定工作,在国际平台上积极发声,“占位置、抢布局、重竞争”,在面向未来的竞争中掌握主动。
2.开放心态,加强多方合作、力量整合和总体布局。
自主船是多设备、多系统、多功能耦合的复杂集合体,涉及到软件、硬件、数据、标准横跨多个行业和领域。
中国应加强设备配套商、造船厂、船级社、卫星服务、海事服务、气象公司、通导设备商、机械制造商、科研机构等海事工业全产业链的协调与合作,并与政府部门、保险业、托运人、风险评估等非技术方积极沟通,实现优势互补、合作共赢,提升中国船舶工业影响力。
3.使用基于模型的系统工程开发方法进行自主船设计。
MBSE使用系统建模语言及支持软件,建立动态可执行的系统模型,通过在计算机中对系统模型的全系统仿真、随时仿真和全周期仿真,可以及时发现设计的问题并加以修改。
目前它已广泛应用于航空航天工业和自动驾驶汽车领域,在赛博-物理系统、无人系统和智能系统的研制中大显身手。
航运业引入本方法进行自主船设计,可以极大的提高研发效率,发展前景广阔。









