散落海底,来自列克星敦号“菲力猫”中队的一架F-4F,是保罗团队让她得以重现在眼前
散落海底,来自列克星敦号“菲力猫”中队的一架F-4F,是保罗团队让她得以重现在眼前
保罗·艾伦(Paul Allen),一个因为寻找战争沉船而在砍口垒玩家间口耳相传的名字,同时也因为其先后发现了数艘大平洋战争期间的著名沉船,而被视作探索历史未知的勇气与希望的象征。不过求知永无止步,继今年年初发现列太太后,他将再次起航,前往以水深地险而闻名的马里亚纳海沟,开始为寻找新的沉船而努力。
俗话说的好“好马配好鞍”,作为微软创始人的顶级富豪自然会给自己的团队配上顶级的装备,本文将对保罗团队此次派出的装备进行一次简单的梳理,让我们一起见证他神通广大的能力来源。

一、“海燕”号深海调查船
一艘基础优秀的科考船是一切海洋探索行动的基础,保罗团队也不例外。虽然他本人所拥有的大型豪华游艇“八爪鱼”号(MV Octopus)装备有机库和无人潜航器释放/回收系统,但终归和海洋工程船只在专业性上有所差距。为此,他在2016年向海洋工程公司“Subsea 7”购买了其旗下一艘海洋工程船“Seven Petrel”号,并将她改造成了保罗团队深海探索的主力舰“海燕”号(RV Petrel)。
 “海燕”的前身——“七海燕”号!(好冷)
“海燕”的前身——“七海燕”号!(好冷)
“海燕”号于2003年建造,是一艘以海底情况勘察(IMR, Survey & Light Construction)为主要任务的中型调查船,全船为典型的海工船设计,宽敞的舰桥前视直升机起降平台,其后则是面积350平方米的主作业甲板。全长76.45m,宽15m,型深8.8m,最大吃水7.465m,总吨位3371t,航速 11.5节,全船共有55个床位,其中单人舱27个,双人舱14个,全船可搭载燃油642m³、液压油32m³、淡水350m³以及1006m³的压载水,自持力67天。装备有DP-2级动力定位系统,全系统包括四台差分GPS参考站、两台HiPAP 500短基线(SSBL)水下定位仪、两台SeaPath 200复合惯性导航系统等在内的精确定位系统,可以在某一单元失效的情况下仍能准确定位自身位置。在动力方面,“Seven Petrel”号安装了四台三菱重工的S16R-MPTK柴油机,总功率6760kW;驱动四台ABB公司的 AMG 500 M4型发电机,输出功率6400kW;全船共装备有5台推进器,其中两台为定距固定式、一台伸缩全回旋式和两台隧道式,除负责推进的定距固定桨是2000kw外,均为1000kw。
 “海燕”号的无人水下航行器操作室
“海燕”号的无人水下航行器操作室
 俯视“海燕”号,可以看见她宽大的直升机甲板和尾部主作业平台
俯视“海燕”号,可以看见她宽大的直升机甲板和尾部主作业平台
“海燕”号原型“Seven Petrel”作为一款以水下勘察为主要使命的海工船,其探测手段与设备可谓多种多样。除了之前提到的定位系统和基础的数据传输与显示设备外,她还装备有多种在线与非在线探测支持设备,例如负责检查海底管道情况的Teledyne TSS 440管道跟踪系统,RDI公司的多普勒测深仪,SD204 型盐温探测器,Tritech SD 704多模测深仪,CODA Geo-kit电子海图,USBL迷你气象站,Visual-Soft数字视频和数据采集和处理系统以及Eiva NaviEdit-NaviModel建模处理系统等,涵盖了软硬件以及水文与天气多方面的因素。改进后的“Seven Petrel”虽然减少了部分海工专用设备,但大大加强了她对水下地形的扫描能力,除了一台原有的Kongsberg EM710船壳多波束探测仪(Multibeam Echosounder (MBES))外还加装了一台Kongsberg EA600单波束探测仪,同时,船载遥控潜水器(ROV)自身还加装有BlueView M450 2D多波束成像声纳和一台EdgeTech 2205 AUV侧扫声呐,可以通过数据总线实时传送到船上数据处理中心。与单波束回声测深仪相比,多波束测深系统具有测量范围大、测量速度快、精度和效率高的优点,它把测深技术从点、线扩展到面,并进一步发展到立体测深和自动成图,特别适合进行大面积的海底地形探测。在保罗多次的水下探测行动中,立下了汗马功劳。
 多波束回声测量仪所拍摄到的水下情况,一览无余,十分形象
多波束回声测量仪所拍摄到的水下情况,一览无余,十分形象
 正在起吊Remus的伸缩起重机,其旁边就是20吨折叠式起重机
正在起吊Remus的伸缩起重机,其旁边就是20吨折叠式起重机
 正在起吊工作者级ROV的“海燕”号,“海燕”并没有在船尾设置A型架,而是放在了舷侧
正在起吊工作者级ROV的“海燕”号,“海燕”并没有在船尾设置A型架,而是放在了舷侧
为了支持水下设备的吊放,“海燕”号装备有Hydramarine公司的20吨折叠式起重机,安装在舰桥右后方的主作业甲板上,最大起吊深度1500米,起吊速度30-60m/分钟,另有一台A型架位于上层建筑右舷,用于吊放与回收ROV。除此以外,改装后的“海燕”还在左舷增设了一台伸缩式起重机,用于适配更先进的水下自主航行器(AUV)
重新“服役”的“海燕”号被漆上了耀眼的蓝色,正如她的名字一样,载着保罗团队穿梭在各个海域间。
二、Remus 6000水下自主航行器
一艘好的勘测船是基础,那么高性能的自动化水下传感器就是赋予保罗团队探测深海目标的关键所在。“海燕”号搭载有多种无人潜水器用于精确定位,其中最值得称道的就是Remus 6000水下自主航行器。

Remus 6000水下自主航行器(AUV)的生产商是美国伍兹霍尔海洋研究所(WHOI),作为和“蓝鳍金枪鱼”齐名的水下航行器研制与生产商,其REMUS/SAHRV系列AUV被广泛运用于军事和民用领域。值得一提的是,保罗是Remus 6000唯一的个人拥有者,如此高精尖的玩具也只有这样具备探索精神的超级富豪才会购买吧。
Remus 6000整体呈纺锤形,像一条有着红色尾鳍和黄色身体的大金枪鱼,长3.96m,直径0.71m,大气中净重862kg,最大航速4.5kt,最大潜深6000m,使用直流无刷电机驱动无护套二叶螺旋桨,使用耦合的偏航和俯仰鳍控制航向。Remus 6000的能源为12 kWh可充电高性能锂电池组,并可增设一个12 kWh电池组,通常充电时间,可循环充放电300次或者5使用年,大续航时间22h。导航方面,Remus 6000配备有广域增强型GPS定位系统(WAAS GPS)、由Kearfott公司研制的激光陀螺仪惯性导航系统(INS),集成了RDI公司的相控阵声学多普勒流速剖面仪(RDI ADCP)(可选配),在无GPS信号和声学辅助引导的情况下最大导航误差可以控制在每小时5m以内;另装备有长基线(LBL)和超短基线(USBL)定位系统,有效探测距离2km,角误差不超过±0.5°。为了和母船保持联系,Remus 6000装备有水声通讯设备和2.4 GHz WiFi,也可以使用铱星通讯,通过使用基于VIP的操作界面,可以直接用商业电脑进行编程,培训,任务分析,文档编制,维护和故障排除等操作。
 位于“海燕”船尾的Remus 6000自主水下航行器,注意她右侧的旁侧声呐
位于“海燕”船尾的Remus 6000自主水下航行器,注意她右侧的旁侧声呐
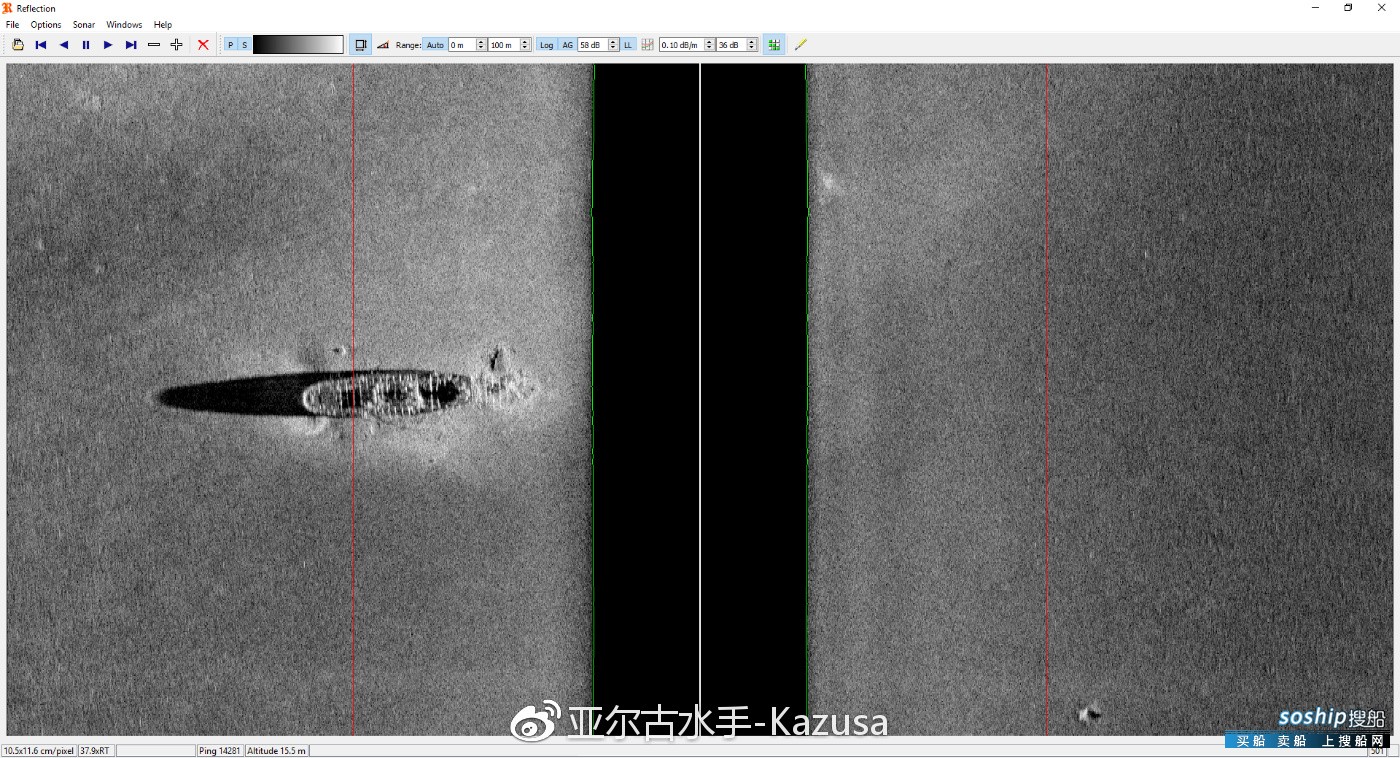 Remus 6000的多波束扫描仪所拍摄到的画面,AUV的意义就在于让搜索更加灵活
Remus 6000的多波束扫描仪所拍摄到的画面,AUV的意义就在于让搜索更加灵活
Remus 6000采用了模块化设计,除了基本的声学探测仪器外还有27kg的有效载荷,这也使得她可以通过换装模块来执行不同的使命,由于缺少资料和不清楚保罗团队内部的具体信息,我们没能获取他们所有的这台Remus 6000具体安装了哪些探测设备,不过按照厂商提供的数据看,除了声学多普勒流速剖面仪与多普勒速度记录仪(ADCP / DVL)、声学调制解调器(低频)外,还安装有电导率和温度传感器,并可以选装双频侧扫声纳与多光束回声测深仪(MBES),其中前者可以用于水下大范围搜索,为接下来的直接勘测——启用ROV进行电视拍摄——铺平了道路。
三、Argus 6000工作者级遥控潜水器
当科考船通过自身的声呐和AUV的声呐确定了沉船的位置后,另一个辛勤的工人就将上线,这就是遥控潜水器(ROV)。和不需要缆线,同时也不需要过多认为介入的无人潜航器(AUV)不同,ROV被一根用于供电和通信的电缆给束缚着,活动范围有限,同时基本上需要人为介入操控。这些听上去略显低下的能力并不都是缺点,相反,由于电缆的存在,续航力不再是问题;操作手可以直接参与定位,更有针对性,可以用人类的经验来弥补可能被机器忽视的细节;更重要的是,ROV可以使用机械臂直接参与对目标的物理接触,在那些人类不可能到达的地方,完成只属于人类的第一次接触。
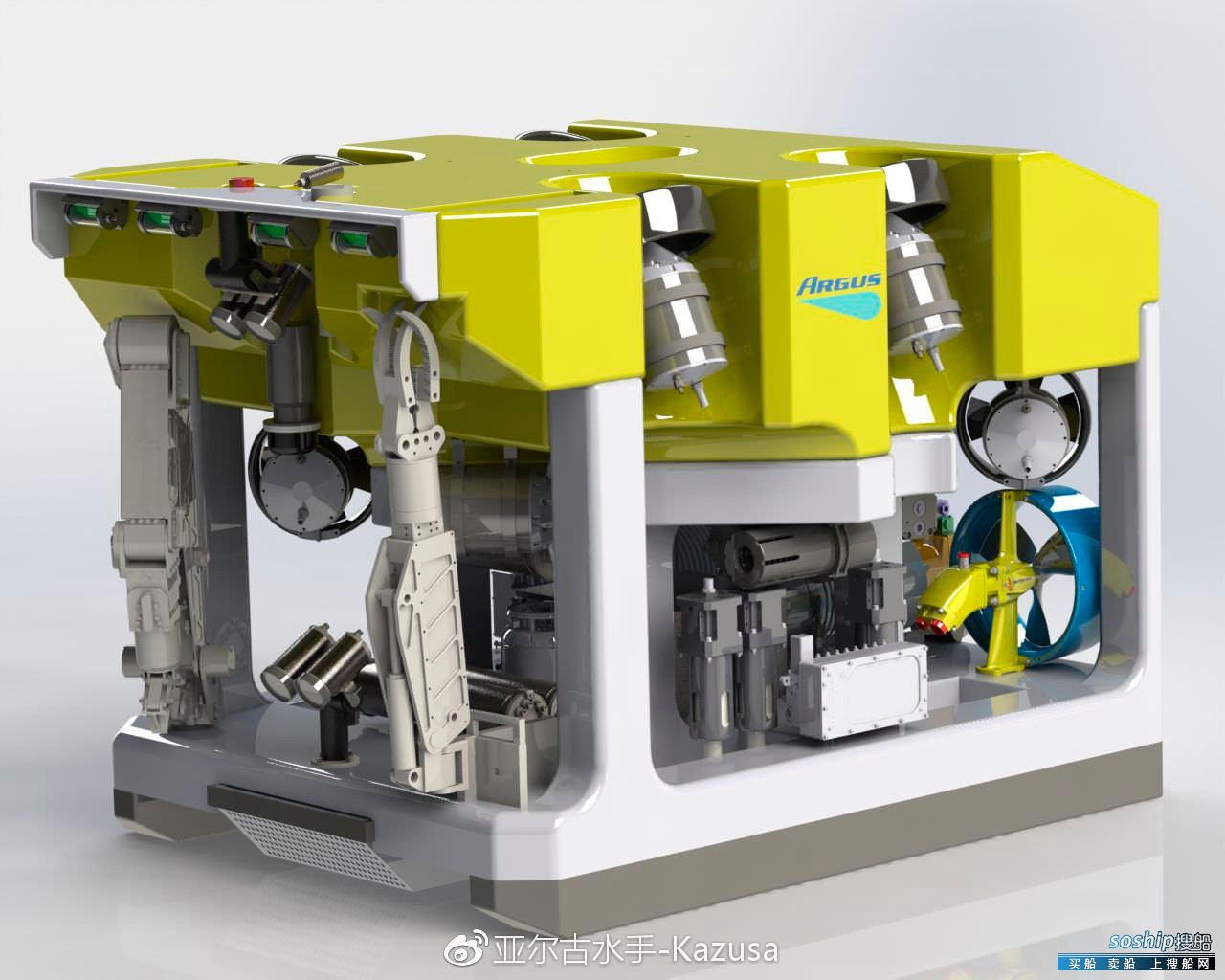 不同种类的ROV,最大的就是工作者级ROV,可以看到她完全镂空的结构
不同种类的ROV,最大的就是工作者级ROV,可以看到她完全镂空的结构
保罗团队当然会选择性能顶尖的ROV,“海燕”号就配备了一台Argus水下机器人公司的工作者级遥控潜水器。这款ROV外形中规中矩,整体由顶部覆盖泡沫浮力材料的玻璃纤维结构和硬质阳极氧化铝或钛合金框架构成,呈一个顶着黄色帽子的金属长方体。其长度2.5m,宽1.6m,高1.7米,结构重量 3000kg,有效载荷250kg,最大下潜深度3000m,不过客户需要的话可以配置为可以下潜到7000m以下的深度。工作者级ROV使用的是三相交流电,共装备有四具垂直推进器和四具水平推进器,每个推进器的功率在6kw-45kw不等,最高航速3节,上下平移最高速度2节,并且上下平移时不会减慢前后的航速。
 “列克星敦”号舷侧的127mm高平两用炮,这些清晰的彩色图片均是由ROV拍摄而来
“列克星敦”号舷侧的127mm高平两用炮,这些清晰的彩色图片均是由ROV拍摄而来
相比较注重探测和识别的AUV与母船,工作者级的主要任务则是目视确认与水下作业,这也是为什么她必须采用强劲的电力分配系统。她固定装备有6台130W的 LED灯,可提供90 000流明的照明,同时还拥有1台F / Z HDTV 1080p相机和1台Lowlight黑白相机,可以通过电缆将拍摄到的高清视频直接传回母船。如果有障碍物需要清除,或者是要取走某件文物,工作者级可以安装一具5 function Schilling Rigmaster或者是Atlas1x7 function Schilling T4型机械臂。同时她还装备有KVH C-100 Fluxgate定位仪和SAIV TD303深度传感器,用来给操作人员展现具体的方位。工作者级可以使用“海燕”号上的A型架进行整体吊装,除了系深进行3000m探测外,还可以进行不系绳7000m自由搜索,太太和西村舰队的图像就是由她拍摄到的。
小结
马里亚纳海沟是世界上最深的海沟,其地处地震多发地带,板块运动剧烈,地质活动频繁,这都给搜索沉没舰艇的具体位置造成了不少的麻烦。不过即使如此,我们仍然相信,那些困难可以用勇气和希望去补足,也真心希望保罗团队可以再次发现那些静静躺在幽幽深海下的金属躯体,创造新的属于人类的奇迹。
探索永不止步
来源:微博@亚尔古水手-Kazusa